















 PRZEWAGA NAD RASPI I NAD ARMAMI..
PRZEWAGA NAD RASPI I NAD ARMAMI.. kezook
kezook BB
BB True
True ori
ori faucolt
faucolt Darek
Darek tomek
tomek kezook
kezook Wbm
Wbm









Diody LED ze sterownikiem APA102 to kolejna propozycja dla osób planujących stworzenie sterowanego oświetlenia z wykorzystaniem diod RGB. W odróżnieniu od opisywanych już wcześniej taśm ze sterownikami WS2812 i WS2813, taśma ta wykorzystuje interfejs SPI 2-wire, zdolny do osiągnięcia prędkości transmisji nawet do 12MHz. Jeśli chodzi zaś o częstotliwość odświeżania, to wynosi ona aż 20kHz, co czyni APA102 wręcz idealną do wszelkich aplikacji POV.
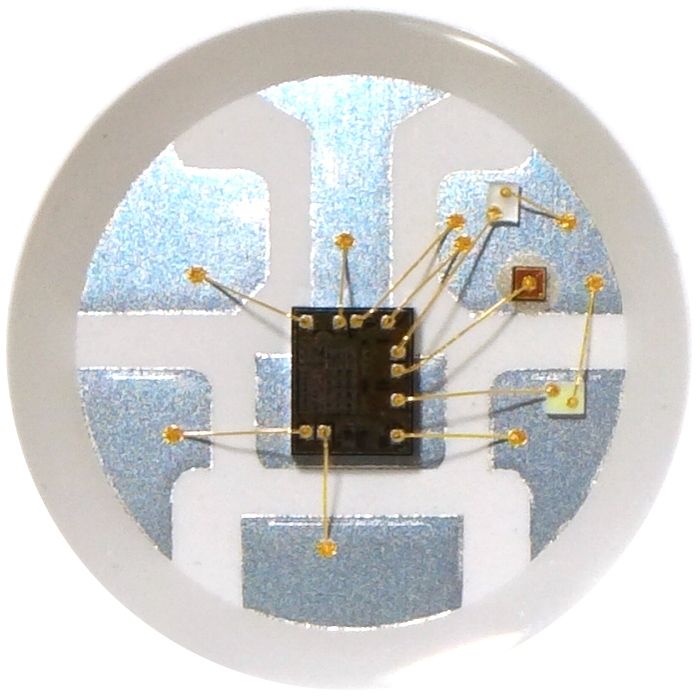
Struktura wewnętrzna diody ze sterownikiem APA102C
Reklama
Nie da się zaprzeczyć, że obecnie najpopularniejsze taśmy i moduły LED wykorzystują sterownik oznaczony symbolem WS2812B. Głównym tego powodem jest ich wysoka dostępność i dość niska cena. W naszych rodzimych sklepach za odcinek jednego metra i gęstości 30 diod przyjdzie nam zapłacić około 23 złotych. Jeśli jednak nie straszne jest nam zamawianie na AliExpress i mamy sprawdzonego sprzedawcę, możemy dostać je jeszcze taniej. Oczywiście trzeba się również liczyć z ewentualną odprawą celną, gdzie mogą zostać doliczone dodatkowe opłaty.
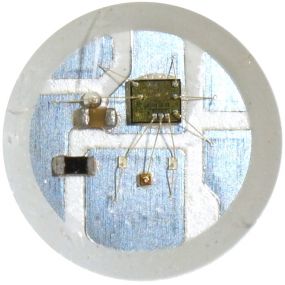
Struktura diody ze sterownikiem WS2813
Oprócz diod ze sterownikiem WS2812B są jeszcze inne ciekawe propozycje. Jedną z nich może być chociażby nowsza odmiana oznaczona jako WS2813, która może śmiało konkurować z diodami ze sterownikiem SK6812 czy nawet z SK6822.
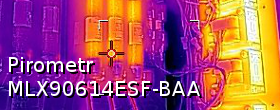
Jakiś czas temu borykałem się z problemem wyboru mikroskopu cyfrowego, który sprawdziłby się podczas lutowania elementów SMD. Chociaż miałem już w rękach popularne na Allegro mikroskopy podłączane do portu USB 2.0, to kompletnie nie spełniły one moich oczekwiań. Największą ich wadę stanowiło ogromne opóźnienie w przesyłanym obrazie oraz sama konstrukcja, która minimalizowała dostępną odległość roboczą, skutecznie uniemożliwiając swobodę ruchów. Można je dostać w cenie około 100 złotych, jednak stanowczo odradzam ich zakup, ponieważ przydać się mogą jedynie do prowizorycznej inspekcji PCB i to w dość naciąganym zakresie.
Z drugiej strony chciałem również uniknąć zbyt wygórowanych kosztów jakie musiałbym ponieść przy zakupie profesjonalnego mikroskopu stereoskopowego, z możliwością montażu kamery cyfrowej. Oczywiście nie sposób odmówić im ogromnego komfortu pracy za sprawą odczuwalnej głębi obserwowanego obiektu, ale kwota rzędu kilku tysięcy złotych może mocno odstraszać.
Szukając czegoś po środku, natrafiłem na mikroskop cyfrowy Andonstar ADSM201 w cenie 199 dolarów - co w przeliczeniu na złotówki da nam kwotę około 800,00 złotych.

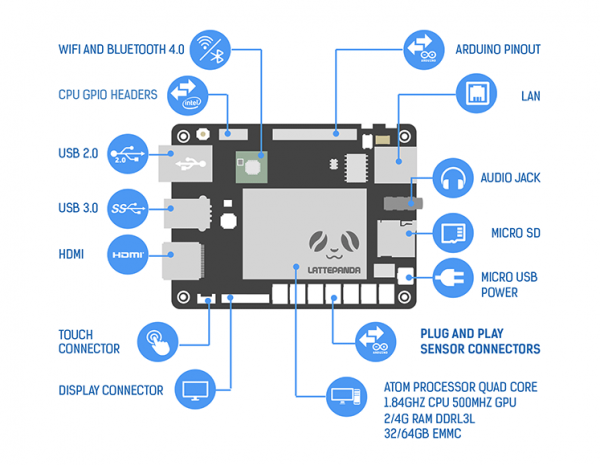
LattePanda z procesorem Intel Atom x5 Z8300
LattePanda to kolejny minikomputer wyposażony w czterordzeniowy procesor Intel Atom x5 Z8300 o maksymalnym taktowaniu zegara wynoszącym 1.8GHz. Jest to więc nieco słabsza jednostka niż ta, która została wykorzystana w testowanej już płytki Up-Board z procesorem Intel Atom x5 Z8350. Można więc pokusić się o stwierdzenie, że LattePanda stanowi dla niego poważną konkurencję.
LattePanda 4GB RAM / 64GB eMMC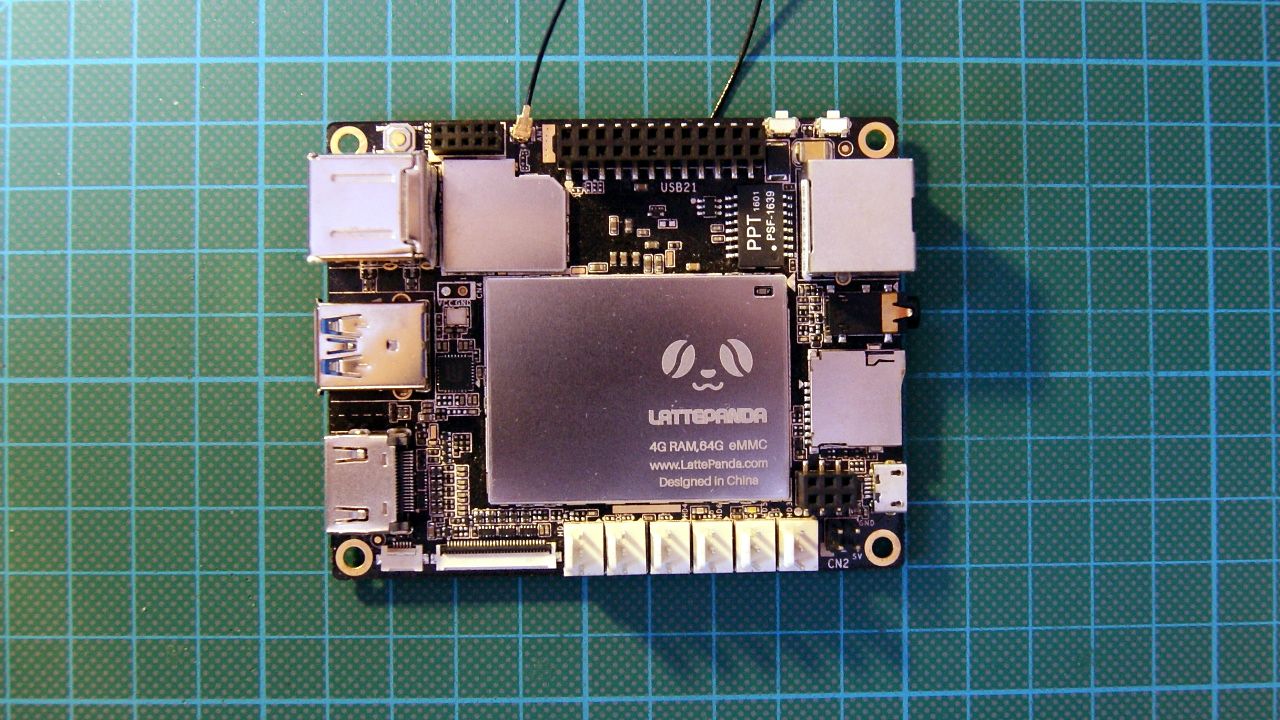
LattePanda oferowana jest w dwóch wersjach różniących się ilością pamięci RAM i dostępnej powierzchni pamięci eMMC. Tańsza wersja posiada 2GB pamięci RAM oraz 32GB pamięci eMMC, natomiast droższa 4GB pamięci RAM i 64GB pamięci eMMC. Jeśli spojrzymy na ceny w polskich sklepach, są to odpowiednio kwoty 450,00 i 900,00 złotych, a więc nieco zbliżone do Up-Board, które wynoszą 560,00 i 770,00 zł. LattePanda dodatkowo posiada wbudowany moduł Wi-Fi oraz BT, którego z kolei Up-Board nie posiada. Ciekawym rozwiązaniem jest także obecność mikrokontrolera Atmega32u4, który możemy programować identycznie jak Arduino Leonardo.
Mikrokontroler Atmega32u4
Same możliwości wydają się bardzo interesujące za sprawą wyprowadzonych pinów Arduino, złącza GPIO, gniazda audio-jack, złącz Grove oraz slotu microSD. Do płytki możemy również bezpośrednio podłączyć dedykowany 7" panel LCD IPS oraz nakładkę dotykową, które nie są przesadnie drogie.
Niestety mój panel IPS dotarł uszkodzony, objawiając się uciążliwym migotaniem obrazu. Producent od razu zasugerował mi, że jest to moja wina odwrotnego podłączenia taśmy, która musiała spowodować uszkodzenie. Koronnym argumentem było stwierdzenie, że innej przyczyny nie ma. No trudno.
Mimo osobistych problemów z panelem IPS można odnieść wrażenie, że LattePanda stanowi finalnie bardzo ciekawą alternatywę - niestety tak nie jest.
Nowy lider wydajności? Jetson TX2 od NVIDIA
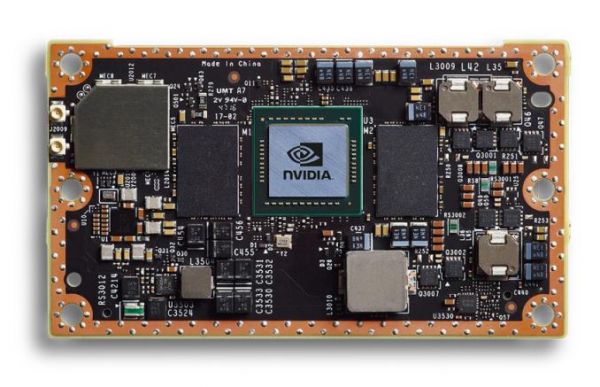
NVIDIA zaprezentowała swój nowy układ SoC Tegra X2, który ma być dwukrotnie wydajniejszy od swojego poprzednika Tegra X1 przy zbliżonym poziomie TDP wynoszącym 15W. Dostępny będzie także specjalny tryb pracy Max-Q, który przy poziomie TDP 7.5W oferuje zbliżone osiągi do Jetson TX1.
Jednostka została oparta o czterordzeniowy układ Cortex-A57 oraz autorski, dwurdzeniowy układ Denver 2, pracujące z maksymalną częstotliwością 2GHz i 1.4GHz. Zwiększeniu uległ także rozmiar pamięci RAM oraz szerokość szyny, które wynoszą kolejno 8GB i 128-bitów, oferując przy tym przepustowść 60GB/s.
Wedle oczekiwań układ graficzny został oparty o architekturę Pascal z 256 rdzeniami CUDA, mogący pochwalić się wydajnością na poziomie 666 GFPLOS i taktowaniem do 1300MHz.
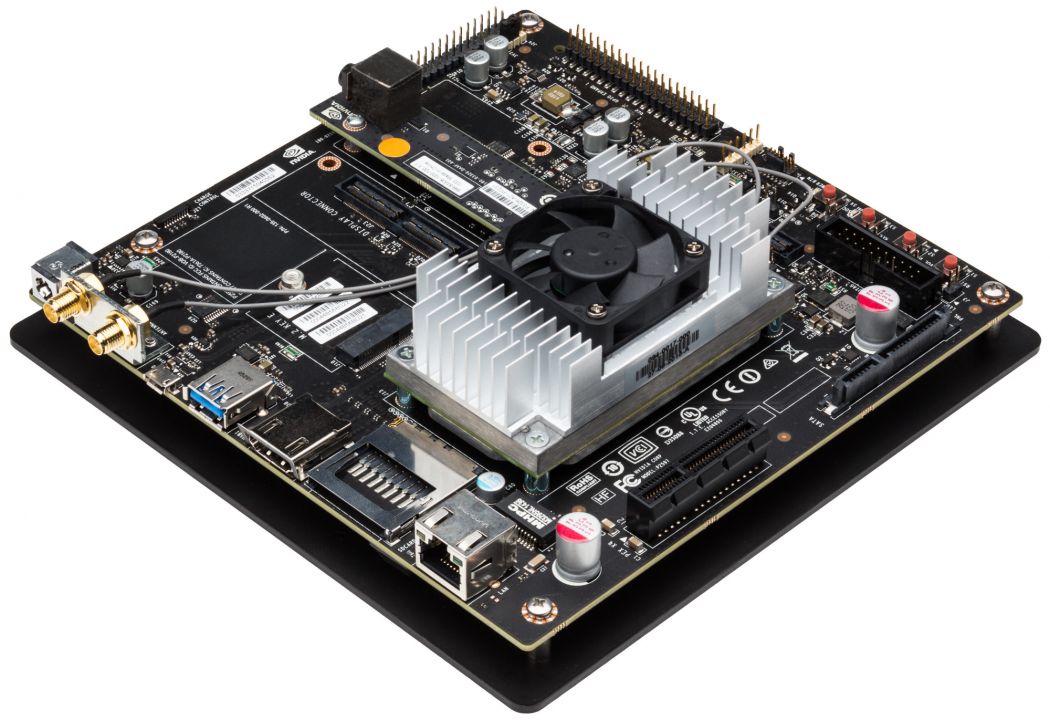
Niestety zestaw deweloperski najprawdopodobniej będzie poza zasięgiem wielu użytkowników (w tym mnie), ponieważ wyceniono go na kwotę 599 dolarów i 299 dolarów dla placówek naukowych.
Jeśli jesteście ciekawi jak radziły sobie poprzednie generacje Jetsona, zaparaszam do poniższych wpisów:
- NVIDIA Jetson TK1 - pierwsze wrażenia
- NVIDIA Jetson TX1 - pierwsze wrażenia
- Starcie tytanów: Jetson TX1 vs Jetson TK1
Porównanie całej rodziny prezentuje się następująco:
| Jetson TK1 | Jetson TX1 | Jetson TX2 | |
 |
 |
 |
|
| Procesor | Tegra K1 | Tegra X1 | Tegra X2 |
| Rodzina | Quad ARM® Cortex A15 NVIDIA 4-Plus-1 |
Quad ARM® A57/2 MB L2 Quad ARM® A53 (Shadow cores) |
Quad ARM® A57/2 MB L2
HMP Dual Denver 2/2 MB L2 |
| Zegar procesora | 2.32 GHz | 1.90 GHz (Cotrex A57) 1.30 GHz (Cortex A53) |
2.00 GHz (Cortex A57) / 1.40 GHz (Denver) 1.40 GHz (Cortex A57) / 2.00 GHz (Denver) |
| Liczba rdzeni | 4 + 1 | 4 + 4 | 4 + 2 |
| Układ graficzny | NVIDIA Kepler (GK20A) 330 GFLOPS (FP32) |
NVIDIA Maxwell (GM20B)
512 GFLOPS (FP32) |
NVIDIA Pascal (GP10B)
666 GFLOPS (FP32) |
| Rdzeni CUDA | 192 |
256
|
256
|
| Zegar grafiki | 933 MHz | 1000 MHz | 1302 MHz |
| OpenGL ES | 3.1 | 3.1 | 3.2 |
| OpenGL | 4.4 | 4.4 | 4.5 |
| CUDA | 6.0 | 8.0 | 8.0 |
| Vulkan | b/d | 1.0 | 1.0 |
| Pamięć RAM | 2 GB 64-bit DDR3L 12.7 GB/s |
4 GB 64-bit LPDDR4
25.6 GB/s |
8 GB 128 bit LPDDR4
58.3 GB/s |
| USB 2.0 | Tak (1x) | Tak (1x) | Tak (1x) |
| USB 3.0 | Tak (1x) | Tak (1x) | Tak (1x) |
| HDMI | Tak | Tak | Tak |
| eMMC | Tak - 16 GB Version 4.51 |
Tak - 16 GB Version 5.1 |
Tak - 32 GB Version ?? |
| SDHC | Tak | Tak | Tak |
| M.2 Key E | Nie | Tak | Tak |
| SATA | Tak | Tak | Tak |
| PCI-E x4 | Nie | Tak (GEN2) x4 + x1 |
Tak (GEN2) x4 + x1 / x2 + 2x1 |
| 10/100/1000 Ethernet | Tak / Tak / Tak | Tak / Tak / Tak | Tak / Tak / Tak |
| WiFi | Nie | 802.11ac | 802.11ac |
| Bluetooth | Nie | 4.1/BLE | 4.1/BLE |
| IO Ports | GPIO, I2C, CSI, UART | UART, SPI, I2C, I2S, GPIO | CAN, UART, SPI, I2C, I2S, GPIO |
| LCD panel | MIPI / LVDS | 2x DSI 1x eDP 1.4 / DP 1.2 / HDMI |
2x DSI
2x DP 1.2 / HDMI 2.0 / eDP 1.4 |
| Kamera | 2x CSI2 MIPI | Up to 6 Cameras (2 Lane) CSI2 D-PHY 1.1 (1.5 Gbps/Lane) |
Up to 6 Cameras (2 Lane) CSI2 D-PHY 1.2 (2.5 Gbps/Lane) |
